





安川机器人MPX1150 负载5KG 臂展727mm 6轴 喷涂专用型 安全防爆

MPX1150
-
通过*小化机器人尺寸和干涉半径实现高密度放置
-
有效载荷为5千克,可以安装多个枪和小铃铛。
-
利用通过检查机器人的关节位置(S / L轴无偏移)创建的机器人附近的口袋区域,可以将机器人放置在靠近待涂物体的位置。
型号
MOTOMAN-MPX1150
格式
YR-MPX1150- * 00
结构
垂直铰接式(6自由度)
负载能力
手腕(T轴)
5公斤
臂(L / U轴)
总共1公斤
*大范围
727毫米
重复定位精度* 1
±0.02毫米
操作范围
S轴(旋转)
-170°至+ 170°(壁挂式:-90°至+ 90°)
L轴(下臂)
-80°至+ 120°
U轴(上臂/下臂相对角度)
-70°至+ 90°
R轴(手腕旋转)
-190°至+ 190°
B轴(手腕摆动)
-135°至+ 135°
T轴(手腕旋转)
-360°至+ 360°
*高速度
1.5米/秒
每个轴的*大速度
S轴(旋转)
6.10 rad / s,350°/ s
L轴(下臂)
6.10 rad / s,350°/ s
U轴(上臂)
6.98 rad / s,400°/ s
R轴(手腕旋转)
7.85 rad / s,450°/ s
B轴(手腕摆动)
7.85 rad / s,450°/ s
T轴(手腕旋转)
12.56 rad / s,720°/ s
允许* 2时刻
R轴(手腕旋转)
12 Nm(1.22 kgfm)
B轴(手腕摆动)
12 Nm(1.22 kgfm)
T轴(手腕旋转)
7 Nm(0.71 kgfm)
的惯性允许力矩
(GD 2 /4)
R轴(手腕旋转)
0.3 kgm 2
B轴(手腕摆动)
0.3 kgm 2
T轴(手腕旋转)
0.1 kgm 2
体重
57公斤
安装环境
温度
0°C至+ 40°C
湿度
相对湿度为20%至80%(无冷凝)
振动加速
4.9 m / s 2(0.5 G)或更低
防爆标准* 3
TIIS(日本),FM(北美),ATEX(欧洲),KCs(韩国)
供电能力* 4
1.0千伏安
* 1符合JIS B 8432。* 2重力单位显示在括号中。* 3符合表中的国际标准。请联系我们获取认证的状态。* 4这取决于应用和操作模式。(注)该表显示在SI单位系统中。
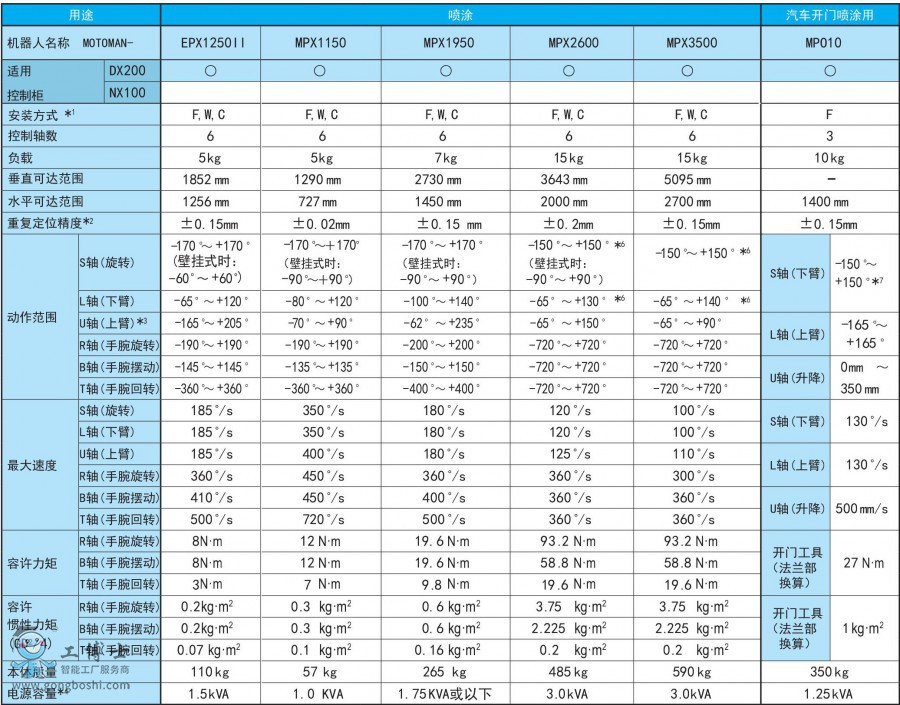
MPX系列所有型号参数说明(用途:喷涂、搬运)
| 型号 | MOTOMAN-MPX1150 | ||
|---|---|---|---|
| 格式 | YR-MPX1150- * 00 | ||
| 结构 | 垂直铰接式(6自由度) | ||
| 负载能力 | 手腕(T轴) | 5公斤 | |
| 臂(L / U轴) | 总共1公斤 | ||
| *大范围 | 727毫米 | ||
| 重复定位精度* 1 | ±0.02毫米 | ||
| 操作范围 | S轴(旋转) | -170°至+ 170°(壁挂式:-90°至+ 90°) | |
| L轴(下臂) | -80°至+ 120° | ||
| U轴(上臂/下臂相对角度) | -70°至+ 90° | ||
| R轴(手腕旋转) | -190°至+ 190° | ||
| B轴(手腕摆动) | -135°至+ 135° | ||
| T轴(手腕旋转) | -360°至+ 360° | ||
| *高速度 | 1.5米/秒 | ||
| 每个轴的*大速度 | S轴(旋转) | 6.10 rad / s,350°/ s | |
| L轴(下臂) | 6.10 rad / s,350°/ s | ||
| U轴(上臂) | 6.98 rad / s,400°/ s | ||
| R轴(手腕旋转) | 7.85 rad / s,450°/ s | ||
| B轴(手腕摆动) | 7.85 rad / s,450°/ s | ||
| T轴(手腕旋转) | 12.56 rad / s,720°/ s | ||
| 允许* 2时刻 | R轴(手腕旋转) | 12 Nm(1.22 kgfm) | |
| B轴(手腕摆动) | 12 Nm(1.22 kgfm) | ||
| T轴(手腕旋转) | 7 Nm(0.71 kgfm) | ||
|
的惯性允许力矩 (GD 2 /4) |
R轴(手腕旋转) | 0.3 kgm 2 | |
| B轴(手腕摆动) | 0.3 kgm 2 | ||
| T轴(手腕旋转) | 0.1 kgm 2 | ||
| 体重 | 57公斤 | ||
| 安装环境 | 温度 | 0°C至+ 40°C | |
| 湿度 | 相对湿度为20%至80%(无冷凝) | ||
| 振动加速 | 4.9 m / s 2(0.5 G)或更低 | ||
| 防爆标准* 3 | TIIS(日本),FM(北美),ATEX(欧洲),KCs(韩国) | ||
| 供电能力* 4 | 1.0千伏安 | ||









