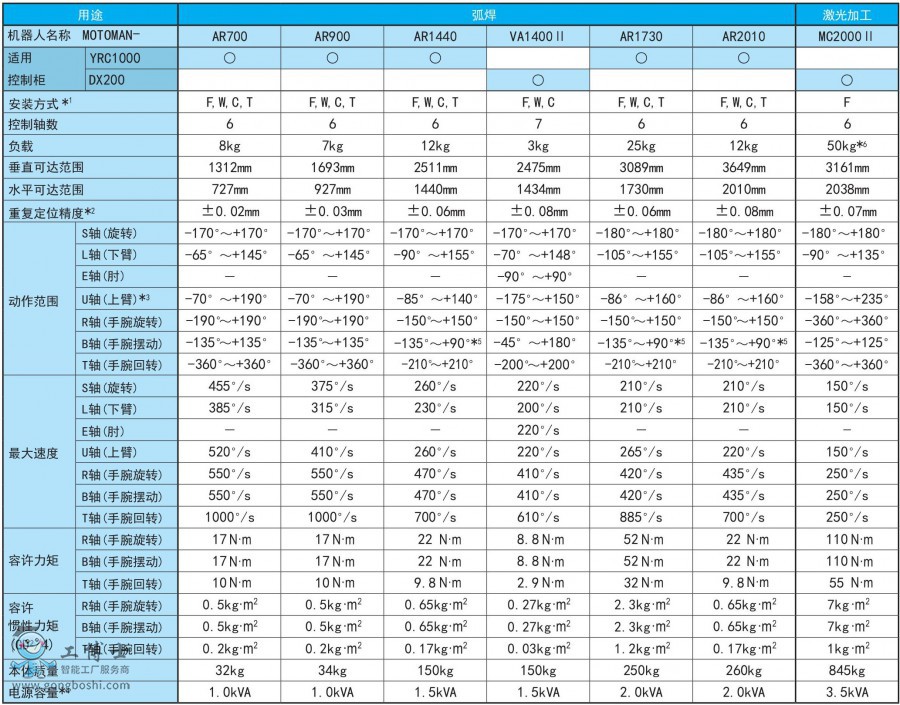






弧焊专用AR2010代替MA2010 新一代安川机器人

AR2010
-
伺服割炬和各种传感器可以安装7千克的有效载荷
-
高速运行可减少空气切割时间
-
采用纤薄机身,可*大限度地减少干扰半径,从而为设备的紧凑性做出贡献
-
适用于小零件焊接
型号
MOTOMAN-AR2010
格式
YR-1-06VXH25-A11
结构
垂直铰接式(6自由度)
有效载荷* 1
12公斤
*大范围
2010毫米
重复定位精度* 2
±0.08毫米
操作范围
S轴(旋转)
-180°至+ 180°
L轴(下臂)
-105°至+ 155°
U轴(上臂)* 3
-86°至+ 160°
R轴(手腕旋转)
-200°至+ 200°( - 150°至+ 150°)* 6
B轴(手腕摆动)
-150°至+ 150°(-135°至+ 90°)* 6 * 7
T轴(手腕旋转)
-455°至+ 455°( - 210°至+ 210°)* 6
*高速度
S轴(旋转)
3.67 rad / s,210°/ s
L轴(下臂)
3.67 rad / s,210°/ s
U轴(上臂)
3.84 rad / s,220°/ s
R轴(手腕旋转)
7.59 rad / s,435°/ s
B轴(手腕摆动)
7.59 rad / s,435°/ s
T轴(手腕旋转)
12.2 rad / s,700°/ s
允许的
时刻
R轴(手腕旋转)
22 Nm
B轴(手腕摆动)
22 Nm
T轴(手腕旋转)
9.8 Nm
允许惯性
力矩
(GD 2 /4)
R轴(手腕旋转)
公斤·男0.65 2
B轴(手腕摆动)
公斤·男0.65 2
T轴(手腕旋转)
公斤·男0.17 2
体重
260公斤
保护程度
主体:IP54手腕轴:IP67
安装环境
温度
0℃至+ 45℃
湿度
相对湿度为20%至80%(无冷凝)
振动加速
4.9 m / s 2(0.5 G)或更低
海拔
1000米或更少
否则
-
没有易燃或腐蚀性气体/液体
-
避免接触水,油,灰尘等。
-
附近没有电噪声源
-
没有产生强磁场
供电能力* 4
2.0千伏安
安装方法* 5
落地式,安装在天花板上,壁挂式,倾斜式
* 1U臂上部负载根据手腕负载质量而变化。* 2符合JIS B 8432。* 3指示轴的操作范围而不是地面标准。* 4这取决于应用和操作模式。* 5在壁挂式或倾斜式安装的情况下,S轴上存在操作限制。* 6与MOTOPAC一起使用时的操作范围是()中的值。* 7在天花板安装中使用MOTOPAC时,切换操作范围的正/负。(注)该表显示在SI单位系统中。
| 型号 | MOTOMAN-AR2010 | |
|---|---|---|
| 格式 | YR-1-06VXH25-A11 | |
| 结构 | 垂直铰接式(6自由度) | |
| 有效载荷* 1 | 12公斤 | |
| *大范围 | 2010毫米 | |
| 重复定位精度* 2 | ±0.08毫米 | |
| 操作范围 | S轴(旋转) | -180°至+ 180° |
| L轴(下臂) | -105°至+ 155° | |
| U轴(上臂)* 3 | -86°至+ 160° | |
| R轴(手腕旋转) | -200°至+ 200°( - 150°至+ 150°)* 6 | |
| B轴(手腕摆动) | -150°至+ 150°(-135°至+ 90°)* 6 * 7 | |
| T轴(手腕旋转) | -455°至+ 455°( - 210°至+ 210°)* 6 | |
| *高速度 | S轴(旋转) | 3.67 rad / s,210°/ s |
| L轴(下臂) | 3.67 rad / s,210°/ s | |
| U轴(上臂) | 3.84 rad / s,220°/ s | |
| R轴(手腕旋转) | 7.59 rad / s,435°/ s | |
| B轴(手腕摆动) | 7.59 rad / s,435°/ s | |
| T轴(手腕旋转) | 12.2 rad / s,700°/ s | |
|
允许的 时刻 |
R轴(手腕旋转) | 22 Nm |
| B轴(手腕摆动) | 22 Nm | |
| T轴(手腕旋转) | 9.8 Nm | |
|
允许惯性 力矩 (GD 2 /4) |
R轴(手腕旋转) | 公斤·男0.65 2 |
| B轴(手腕摆动) | 公斤·男0.65 2 | |
| T轴(手腕旋转) | 公斤·男0.17 2 | |
| 体重 | 260公斤 | |
| 保护程度 | 主体:IP54手腕轴:IP67 | |
| 安装环境 | 温度 | 0℃至+ 45℃ |
| 湿度 | 相对湿度为20%至80%(无冷凝) | |
| 振动加速 | 4.9 m / s 2(0.5 G)或更低 | |
| 海拔 | 1000米或更少 | |
| 否则 |
|
|
| 供电能力* 4 | 2.0千伏安 | |
| 安装方法* 5 | 落地式,安装在天花板上,壁挂式,倾斜式 | |
* 1U臂上部负载根据手腕负载质量而变化。* 2符合JIS B 8432。* 3指示轴的操作范围而不是地面标准。* 4这取决于应用和操作模式。* 5在壁挂式或倾斜式安装的情况下,S轴上存在操作限制。* 6与MOTOPAC一起使用时的操作范围是()中的值。* 7在天花板安装中使用MOTOPAC时,切换操作范围的正/负。(注)该表显示在SI单位系统中。
AR系列所有机型参数简单说明(用途:弧焊、搬运)